Products - PI (Physik Instrumente) L.P.
James Webb Space Telescope Mirrors Aligned by High Precision 6-Axis Hexapod Robot
Orbiting approximately one million miles from Earth, the James Webb Space Telescope (JWST) is the largest telescope ever launched into space - in its unfolded operational configuration it is nearly the size of a tennis court. Webb’s lightweight deployable primary mirror is segmented into 18 hexagonal pieces on a hinged surface over 21 feet in diameter (6.5 meters).
NASA & PI: Working Together Again
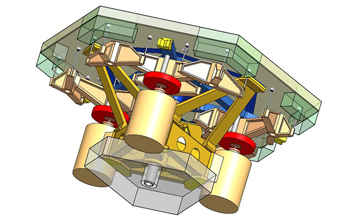
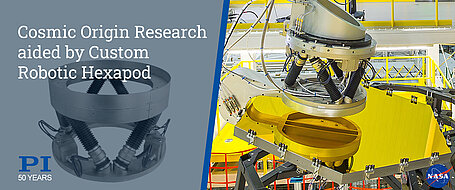
During the assembly of the 18 segments that must work as one single mirror once unfolded in space, NASA engineers make use of a robotic arm (Primary Mirror Alignment and Integration Fixture) precisely controlled in 6 degrees of freedom by a custom hexapod (Stewart Platform) from PI. Gold-coated beryllium was chosen for the segments, for its high stiffness, low weight, and properties to withstand the extremely low temperatures in outer space. Each segment also has a thin gold coating to reflect infrared light.
Positioned at the end of the robotic arm, the custom hexapod has a 200kg load capacity and sub-micrometer resolution, to precisely position the JWST mirror segments during assembly. Hexapods with their programmable center of rotation (pivot point) are the gold standard, when it comes to precise multi-axis alignment tasks, from nanometer sized structures in silicon photonics / fiber optics to big mirrors and reflectors in astronomy. Based on 4 decades of experience, PI hexapods are available in many different sizes and configurations. They are supported by a host of software tools, alignment routines, and accessories. The great flexibility allows the hexapod user to adapt their 6-axis motion system to any alignment application quickly without retooling.
Previously, NASA/JPL relied on PI’s high performance multilayer piezo ceramic actuators used on the Mars rover for their extreme reliability and lifetime beyond 100 billion cycles.
Hexapod Controller / Motion Software
PI’s hexapod controllers and hexapod software are based on decades of experience with parallel kinematic motion systems. PI’s free hexapod software simulates the limits of workspace and load capacity, thereby ensuring the hexapod you choose will handle the loads, forces, and torques in your application.
For a better understanding of Hexapod capabilities, see a collection of Applications Articles