|
Active axes
|
X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ
|
X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ
|
|
|
Travel range in X
|
± 50 mm
|
± 50 mm
|
|
|
Travel range in Y
|
± 50 mm
|
± 50 mm
|
|
|
Travel range in Z
|
± 25 mm
|
± 25 mm
|
|
|
Rotation range in θX
|
± 15 °
|
± 15 °
|
|
|
Rotation range in θY
|
± 15 °
|
± 15 °
|
|
|
Rotation range in θZ
|
± 30 °
|
± 30 °
|
|
|
Maximum velocity in X
|
2.5 mm/s
|
0.15 mm/s
|
|
|
Recommended velocity in X
|
2 mm/s
|
0.1 mm/s
|
|
|
Maximum velocity in Y
|
2.5 mm/s
|
0.15 mm/s
|
|
|
Recommended velocity in Y
|
2 mm/s
|
0.1 mm/s
|
|
|
Maximum velocity in Z
|
2.5 mm/s
|
0.15 mm/s
|
|
|
Recommended velocity in Z
|
2 mm/s
|
0.1 mm/s
|
|
|
Maximum angular velocity in θX
|
30 mrad/s
|
1.8 mrad/s
|
|
|
Recommended angular velocity in θX
|
25 mrad/s
|
1.2 mrad/s
|
|
|
Maximum angular velocity in θY
|
30 mrad/s
|
1.8 mrad/s
|
|
|
Recommended angular velocity in θY
|
25 mrad/s
|
1.2 mrad/s
|
|
|
Maximum angular velocity in θZ
|
30 mrad/s
|
1.8 mrad/s
|
|
|
Recommended angular velocity in θZ
|
25 mrad/s
|
1.2 mrad/s
|
|
|
Positioning
|
H-850.G2V
|
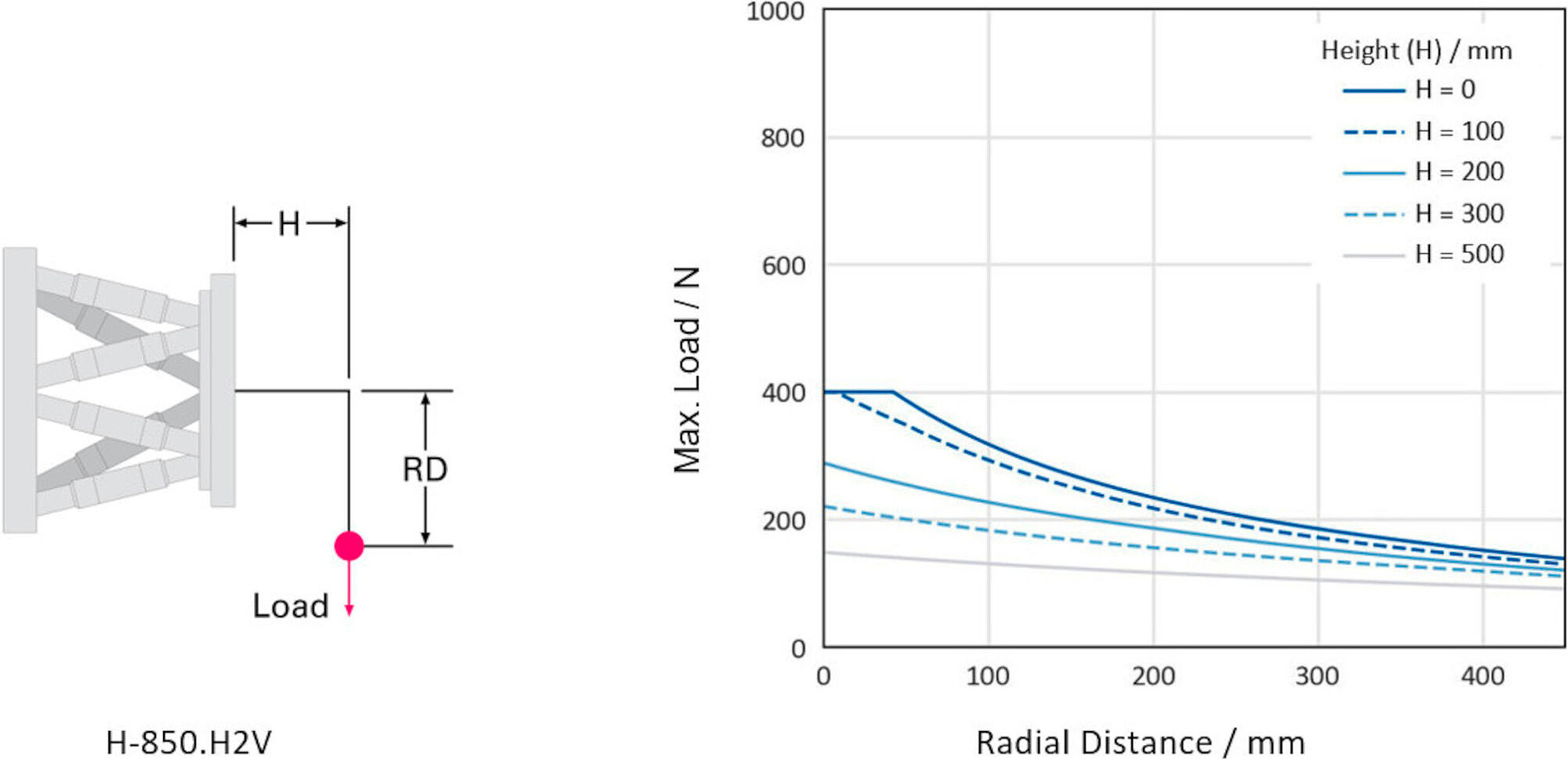
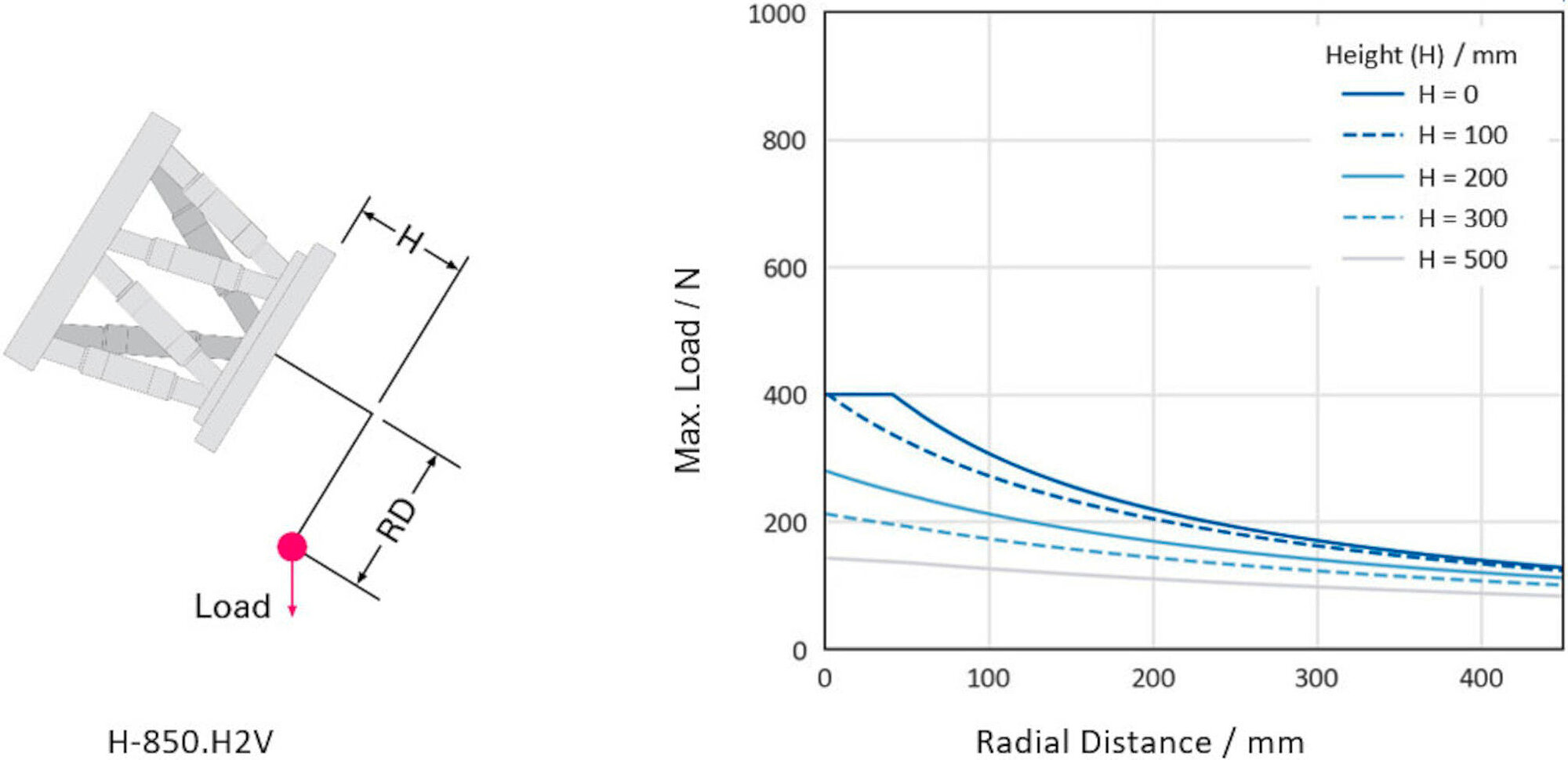
H-850.H2V
|
Tolerance
|
|
Minimum incremental motion in X
|
1 µm
|
0.3 µm
|
typ.
|
|
Minimum incremental motion in Y
|
1 µm
|
0.3 µm
|
typ.
|
|
Minimum incremental motion in Z
|
0.5 µm
|
0.2 µm
|
typ.
|
|
Minimum incremental motion in θX
|
7.5 µrad
|
3 µrad
|
typ.
|
|
Minimum incremental motion in θY
|
7.5 µrad
|
3 µrad
|
typ.
|
|
Minimum incremental motion in θZ
|
15 µrad
|
5 µrad
|
typ.
|
|
Unidirectional repeatability in X
|
± 0.5 µm
|
± 0.5 µm
|
typ.
|
|
Unidirectional repeatability in Y
|
± 0.5 µm
|
± 0.5 µm
|
typ.
|
|
Unidirectional repeatability in Z
|
± 0.2 µm
|
± 0.2 µm
|
typ.
|
|
Unidirectional repeatability in θX
|
± 3 µrad
|
± 3 µrad
|
typ.
|
|
Unidirectional repeatability in θY
|
± 3 µrad
|
± 3 µrad
|
typ.
|
|
Unidirectional repeatability in θZ
|
± 7.5 µrad
|
± 9 µrad
|
typ.
|
|
Backlash in X
|
8 µm
|
8 µm
|
typ.
|
|
Backlash in Y
|
8 µm
|
8 µm
|
typ.
|
|
Backlash in Z
|
1.5 µm
|
1 µm
|
typ.
|
|
Backlash in θX
|
25 µrad
|
7.5 µrad
|
typ.
|
|
Backlash in θY
|
25 µrad
|
7.5 µrad
|
typ.
|
|
Backlash in θZ
|
90 µrad
|
60 µrad
|
typ.
|
|
Integrated sensor
|
Incremental rotary encoder
|
Incremental rotary encoder
|
|
|
Drive Properties
|
H-850.G2V
|
H-850.H2V
|
Tolerance
|
|
Drive type
|
DC gear motor with ActiveDrive
|
DC gear motor with ActiveDrive
|
|
|
Nominal voltage
|
24 V
|
24 V
|
|
|
Mechanical Properties
|
H-850.G2V
|
H-850.H2V
|
Tolerance
|
|
Stiffness in X
|
7 N/µm
|
7 N/µm
|
|
|
Stiffness in Y
|
7 N/µm
|
7 N/µm
|
|
|
Stiffness in Z
|
100 N/µm
|
100 N/µm
|
|
|
Maximum load capacity, base plate horizontal
|
25 kg
|
80 kg
|
|
|
Maximum load capacity, base plate in any orientation
|
10 kg
|
40 kg
|
|
|
Maximum holding force, base plate horizontal
|
250 N
|
2000 N
|
|
|
Maximum holding force, base plate in any orientation
|
85 N
|
500 N
|
|
|
Drive screw type
|
Ball screw
|
Ball screw
|
|
|
Overall mass
|
17 kg
|
17 kg
|
|
|
Material
| Aluminum | Aluminum |
|
|
Miscellaneous
|
H-850.G2V
|
H-850.H2V
|
Tolerance
|
|
Operating temperature range
|
-10 to 50 °C
|
-10 to 50 °C
|
|
|
Vacuum class
|
10⁻⁶ ǀ hPa
|
10⁻⁶ ǀ hPa
|
|
|
Maximum bakeout temperature
|
80 °C
|
80 °C
|
|
|
Connector for data transmission
|
HD D-sub 78 (m)
|
HD D-sub 78 (m)
|
|
|
Connector for supply voltage
|
M12 4-pole (m)
|
M12 4-pole (m)
|
|
|
Cable length
|
2 m
|
2 m
|
|
|
Recommended controllers/drivers
| C-887.5xx | C-887.5xx |
|