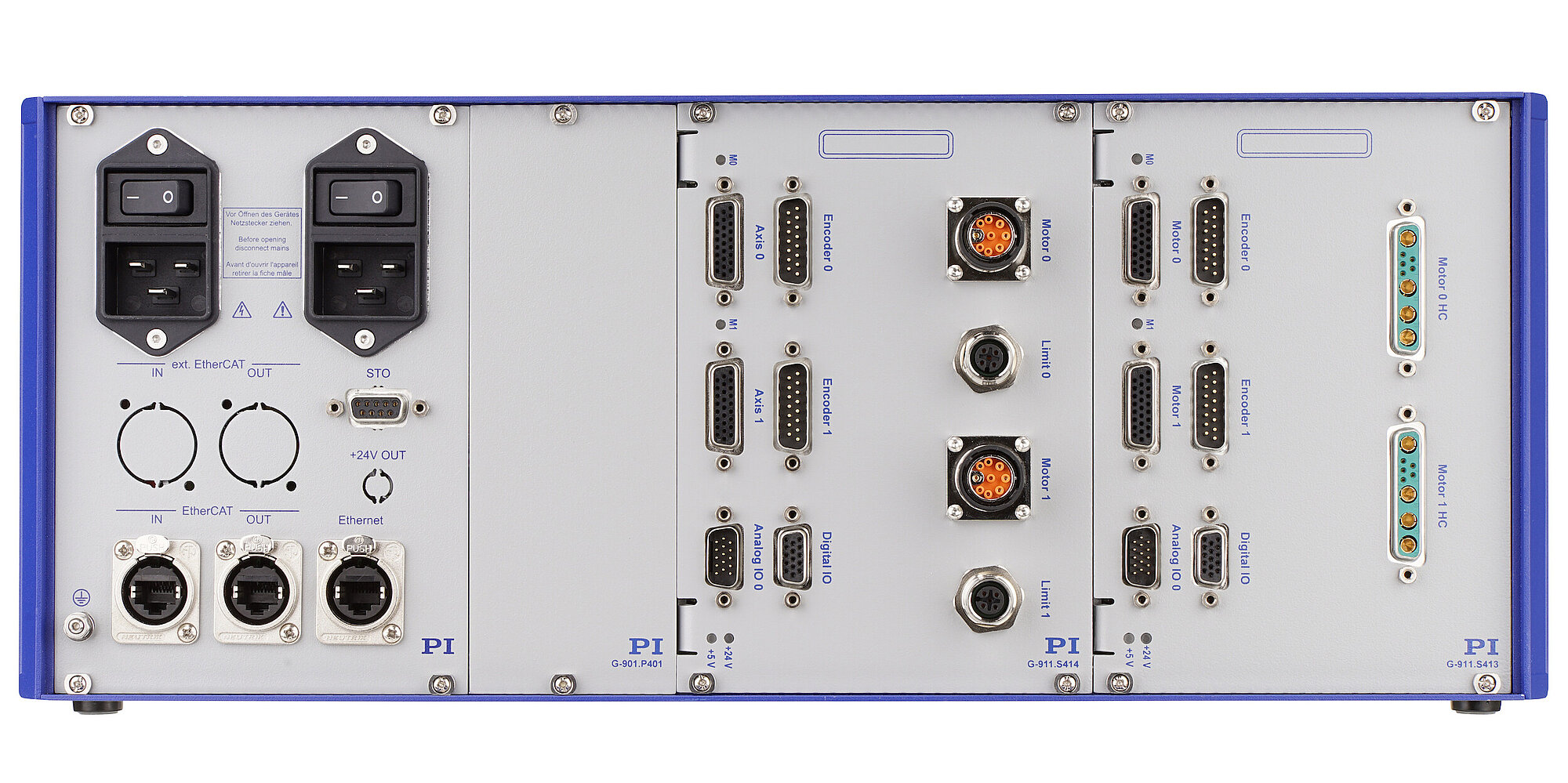
Motor connectors per driver module with 48 V intermediate circuit voltage** | 2 × HD D-sub 26 (f), maximum 3 A continuous current per pin 2 × D-sub 9W4 (f), maximum 20 A per motor phase Alternative use is possible, depending on maximum phase current. The lines for limit and reference switches are available on all connectors. The lines for motor brakes are available on the HD D-sub 26 (f) connectors. |
Motor connectors per driver module with 96 V intermediate circuit voltage** | 2 × M15 9-pin (f) The lines for limit switches are available for: 2 × HD D-sub 26 (f) 2 × M12 5-pin (f) 2 × D-sub 15 (m) The lines for reference switches are available on the HD D-sub 26 (f) connectors. The lines for motor brakes are available on the M15 9-pin (f) and HD D-sub 26 (f) connectors. |
Sensor connectors, per driver module** | 2 × D-sub 15 (m) 2 × HD D-sub 26 (f) Alternative use depending on encoder type. Default factory configuration at delivery: Digital incremental encoder (RS-422) or absolute encoder on HD D-sub 26 (f) Incremental encoder 1 Vss on D-sub 15 (m) Possible modified factory configuration at delivery: Digital incremental encoder (RS-422) or absolute encoder on D-sub 15 (m) |
Digital I/O lines, per driver module | HD D-sub 15 (f): 2 × outputs PNP 24 V source; also control the drivers for the motor brakes Default for inputs: 2 × PNP 24 V source on HD D-sub 15 (f); in addition 2 × NPN 5 V sinking for reference switches on the motor connectors Optional configuration for inputs: 4 × PNP 24 V source on HD D-sub 15 (f) |
Analog I/O lines, per driver module | HD D-sub 15 (m): 2 differential analog inputs: ±10 V, 12-bit 2 differential analog outputs: ±10 V, 10-bit |
Outputs for position event trigger (PEG), per driver module | Parallel on HD D-sub 15 (m) and HD D-sub 15 (f): 2 differential outputs (RS-422) for pulses at programmable positions, pulse width 26 ns to 1.75 ms, max. 10 MHz; only possible with incremental encoder |
Inputs for STO safety function | D-sub 9 (f) 2 differential inputs (STO1, STO2): 24 V, < 50 mA per pin If at least one signal assumes the "low" state, all drives are deactivated at the same time within 50 to 200 ms. |
| Up to 8 axes in an ACS EtherCAT network, also using EtherCAT third-party components. |
Control rate and EtherCAT clock rate | |
| EtherCAT IN and OUT: RJ-45 Ethernet (TCP/IP, Modbus/TCP, EtherNet/IP): RJ-45 RS-232: D-sub 9 (m) |
| ACS SPiiPlus MMI Application Studio |
Application programming interfaces | Programming libraries for C/C++, COM, .NET, MATLAB available |
| ACSPL+ real-time scripting language: Up to 10 simultaneously running programs (buffer) |