S-335.2SH
High-dynamics piezo tip/tilt platform; 35 mrad × 35 mrad rotational angle (θX × θY); SGS, direct position measuring; D-sub 37-pole (m); 2 m cable length


System frequency response with different E-727 controllers and mirror sizes.

S-335.2SH, dimensions in mm. Note that a comma is used in the drawings instead of a decimal point. The general tolerances as specified in DIN ISO 2768-f-H are valid for all dimensions without specified tolerances.

S-335.2SHM1, dimensions in mm. Note that a comma is used in the drawings instead of a decimal point. The general tolerances as specified in DIN ISO 2768-f-H are valid for all dimensions without specified tolerances.

S-335.2SHM2, dimensions in mm. Note that a comma is used in the drawings instead of a decimal point. The general tolerances as specified in DIN ISO 2768-f-H are valid for all dimensions without specified tolerances.





Application fields
Outstanding lifetime thanks to PICMA® piezo actuators
The PICMA® piezo actuators are all-ceramic insulated. This protects them against humidity and failure resulting from an increase in leakage current. PICMA® actuators offer an up to ten times longer lifetime than conventional polymer-insulated actuators. 100 billion cycles without a single failure are proven.
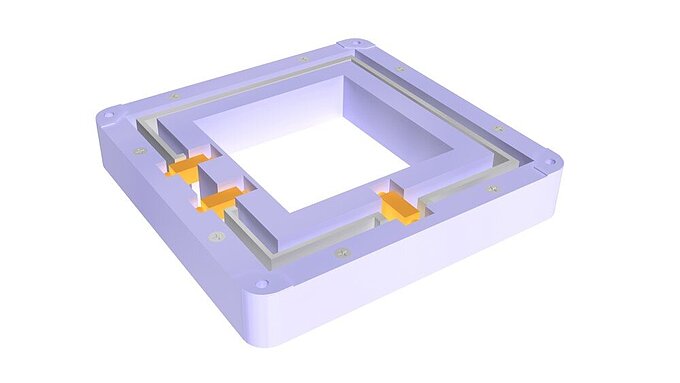
High guiding accuracy due to zero-play flexure guides
Flexure guides are free of maintenance, friction, and wear, and do not require lubrication. Their stiffness allows high load capacity and they are insensitive to shock and vibration. They work in a wide temperature range.
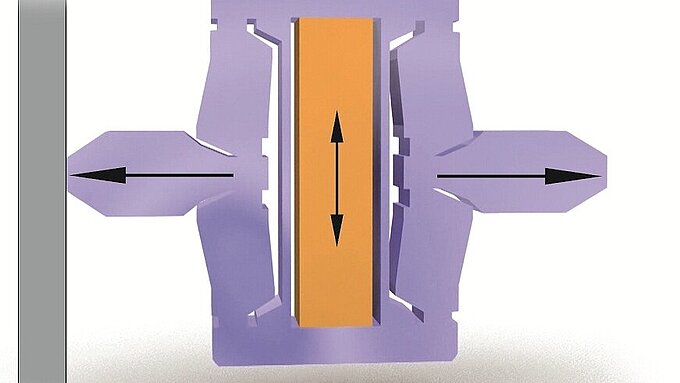
High dynamics multi-axis operation due to parallel kinematics
In a parallel-kinematic multi-axis system, all actuators act on a common platform. The minimum mass inertia and the identical design of all axes allow fast, dynamic, and nevertheless precision motion.
| Motion | S-335.2SH | S-335.2SHM1 | S-335.2SHM2 | Tolerance |
|---|---|---|---|---|
| Active axes | θX ǀ θY | θX ǀ θY | θX ǀ θY | |
| Rotation range in θX | 35 mrad | 35 mrad | 35 mrad | |
| Rotation range in θY | 35 mrad | 35 mrad | 35 mrad | |
| Linearity error in θX, unidirectional | 0.05 % | 0.05 % | 0.05 % | typ. |
| Linearity error in θY, unidirectional | 0.05 % | 0.05 % | 0.05 % | typ. |
| Positioning | S-335.2SH | S-335.2SHM1 | S-335.2SHM2 | Tolerance |
| Bidirectional repeatability in θX | 1 µrad | 1 µrad | 1 µrad | typ. |
| Bidirectional repeatability in θY | 1 µrad | 1 µrad | 1 µrad | typ. |
| Resolution in θX, open loop | 0.1 µrad | 0.1 µrad | 0.1 µrad | typ. |
| Resolution in θY, open loop | 0.1 µrad | 0.1 µrad | 0.1 µrad | typ. |
| Integrated sensor | SGS, direct position measuring | SGS, direct position measuring | SGS, direct position measuring | |
| System resolution in θX | 1 µrad | 1 µrad | 1 µrad | |
| System resolution in θY | 1 µrad | 1 µrad | 1 µrad | |
| Drive Properties | S-335.2SH | S-335.2SHM1 | S-335.2SHM2 | Tolerance |
| Drive type | PICMA® | PICMA® | PICMA® | |
| Electrical capacitance in θX | 6.2 µF | 6.2 µF | 6.2 µF | ±20 % |
| Electrical capacitance in θY | 6.2 µF | 6.2 µF | 6.2 µF | ±20 % |
| Mechanical Properties | S-335.2SH | S-335.2SHM1 | S-335.2SHM2 | Tolerance |
| Resonant frequency in θX, unloaded | 2 kHz | — | — | ±20 % |
| Resonant frequency in θY, under load with glass mirror (Ø 12.5 mm; thickness 3 mm) | 1.6 kHz | 1.6 kHz | — | ±20 % |
| Resonant frequency in θY, under load with glass mirror (Ø 25,4 mm; thickness 4 mm) | 0.7 kHz | — | 0.7 kHz | ±20 % |
| Resonant frequency in θY, unloaded | 2 kHz | — | — | ±20 % |
| Resonant frequency in θY, under load with glass mirror (Ø 12.5 mm; thickness 3 mm) | 1.6 kHz | 1.6 kHz | — | ±20 % |
| Resonant frequency in θY, under load with glass mirror (Ø 25,4 mm; thickness 4 mm) | 0.7 kHz | — | 0.7 kHz | ±20 % |
| Distance of pivot point to platform surface | 3.3 mm | 3.3 mm | 3.3 mm | ±0,25 mm |
| Overall mass | 320 g | 325 g | 330 g | ±5 % |
| Material | Platform and base body: titanium. Housing cover: aluminum. | Platform and base body: titanium. Housing cover: aluminum. | Platform and base body: titanium. Housing cover: aluminum. | |
| Miscellaneous | S-335.2SH | S-335.2SHM1 | S-335.2SHM2 | Tolerance |
| Operating temperature range | -20 to 80 °C | -20 to 80 °C | -20 to 80 °C | |
| Connector | D-sub 37 (m) | D-sub 37 (m) | D-sub 37 (m) | |
| Cable length | 2 m | 2 m | 2 m | +100 / -0 mm |
| Recommended controllers / drivers | E-727 | E-727 | E-727 |
S-335.2SH: Version without mirror
S-335.2SHM1: Version with mirror Ø 12.5 mm
S-335.2SHM2: Version with mirror Ø 25.4 mm
Rotation range in θX / θY: Quasistatic motion at 0 to 120 V.
The resolution of the system is limited only by the noise of the amplifier and the measuring technology because PI piezo nanopositioning systems are free of friction.
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.
S-335.2SH High-Dynamics Tip/Tilt Platform
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
High-dynamics piezo tip/tilt platform; 35 mrad × 35 mrad rotational angle (θX × θY); SGS, direct position measuring; D-sub 37-pole (m); 2 m cable length
High-dynamics piezo tip/tilt platform; 35 mrad × 35 mrad rotational angle (θX × θY); SGS, direct position measuring; D-sub 37-pole (m); 2 m cable length; incl. mirror Ø 12.5 mm
High-dynamics piezo tip/tilt platform; 35 mrad × 35 mrad rotational angle (θX × θY); SGS, direct position measuring; D-sub 37-pole (m); 2 m cable length; incl. mirror Ø 25.4 mm

Highly reliable and extended lifetime through the patented manufacturing process for multilayer actuators.
Flexure guides from PI have proven their worth in nanopositioning. They guide the piezo actuator and ensure a straight motion without tilting or lateral offset.

Digital technology opens up possibilities for improving performance in control engineering which do not exist with conventional analog technology.
In a parallel-kinematic, multi-axis system, all actuators act directly on a single moving platform.