“What drove us was achieving motion performance others deemed impossible.” Motion control engineer Fabian Rudnick gives insights into the development process of PI's learning-based motion control for the future.

The Driving Factor in the Development
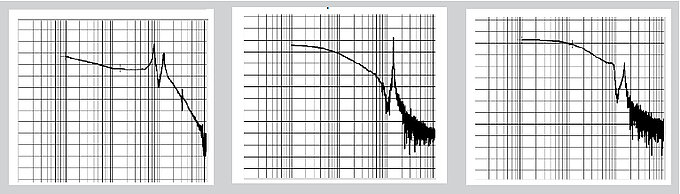
The driving factor for our team was to achieve motion performance that others said is simply not possible. What is meant by this is there's the so-called Bode sensitivity integral which means if you improve in one frequency range, you basically must take something from here and put it somewhere else in the frequency range. There's always a balance, and with this new technology, we’re able to circumvent this fundamental limitation in control theory and thereby achieve way higher performance in the end.
What it means for our customers’ applications is that this technology will allow them to achieve superior disturbance rejection. In the classical feedback and feed forward servo schemes, you're limited to the frequency of disturbances you can reject by the so-called servo bandwidth and anything above it's impossible to deal with it.
With our new technology, we’re able to compensate disturbances well above this limitation and in the end, for our customers this means, in many different applications, that they can improve their standstill jitter, they can reject disturbances much better than before and achieve superior overall motion performance.

New Algorithm Extends Lifetime of Existing Mechanical Design
For the development of these algorithms, very close and long-term relationships with our customers have been beneficial. For example, one of our customers was planning to do a complete redesign of a machine because they were not able to reach specifications required by a new iteration with their given hardware platform. Once the new algorithm was run, we were able to improve the motion performance on the old mechanics, exceeding the new specifications! They saved the expense of the new mechanics development just by applying our new algorithm.
Ongoing Development – Reduction of Following Errors by 10X
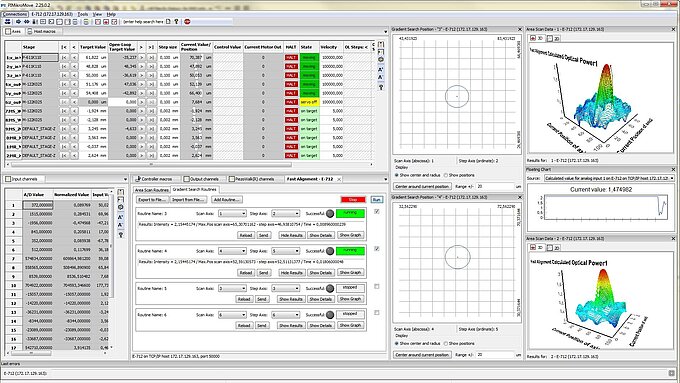
First, it's important to mention that this is still an ongoing development. We are still working on making this new technology more robust and easier to use in our customers’ applications. With this new technology, it’s very challenging to guarantee stability in comparison to the classic linear time invariant systems. The first time we were on a customer site trying this new algorithm, just by activating this feature, we immediately reduced the following error by a factor of 10. Sitting there in front of the machine and the software oscilloscope and watching the following error shrink was really exciting!
Learning Based Motion Control Algorithms in Brief
Feedback- and feedforward-based control algorithms can achieve high levels of performance but have fundamental limitations.
Preventative disturbance compensation: Machine learning control algorithms for high-precision motion systems enable pre-emptive compensation of disturbances and intelligent real-time optimization of feedback- and feedforward- control.
Multiple learning modes for higher performance: Learning from different previous execution modes will allow for minimization of move-and-settle time and dynamic following errors, as well as maximization of stability over a wide range of operations.



Blog Categories
- Aero-Space
- Air Bearing Stages, Components, Systems
- Astronomy
- Automation, Nano-Automation
- Beamline Instrumentation
- Bio-Medical
- Hexapods
- Imaging & Microscopy
- Laser Machining, Processing
- Linear Actuators
- Linear Motor, Positioning System
- Metrology
- Microscopy
- Motorized Precision Positioners
- Multi-Axis Motion
- Nanopositioning
- Photonics
- Piezo Actuators, Motors
- Piezo Mechanics
- Piezo Transducers / Sensors
- Precision Machining
- Semicon
- Software Tools
- UHV Positioning Stage
- Voice Coil Linear Actuator
- X-Ray Spectroscopy