How a Hexapod Brings the Sense of Touch to Mixed Reality
Generating virtual force feedback in 6 degrees of freedom
Mixed reality technology has made enormous progress in visual realism. Engineers and researchers can now create virtual objects that appear convincingly integrated into the real world. However, one challenge remains difficult to solve: making virtual objects feel real when touched.
A research team from HAVELSAN, TOBB University and TED University in Ankara, Turkey addressed this problem by developing a visuo-haptic mixed reality (VHMR) system that combines optical tracking, virtual reality visualization, and a precision hexapod positioning system.
The Challenge: Touching Objects That Do Not Exist
The Challenge: Touching Objects That Do Not Exist
Traditional haptic systems often require the user to hold a stylus mechanically connected to a force-feedback device. While effective, these systems restrict movement and limit realism.
The researchers wanted users to interact with realistic handheld tools that are not physically connected to a robot. For example, a surgeon-in-training could hold a surgical instrument while interacting with a virtual patient, or a technician could use a real screwdriver in a maintenance simulation.
The question was: How can a user feel resistance from a virtual object while holding a completely free tool?
The Hexapod Solution
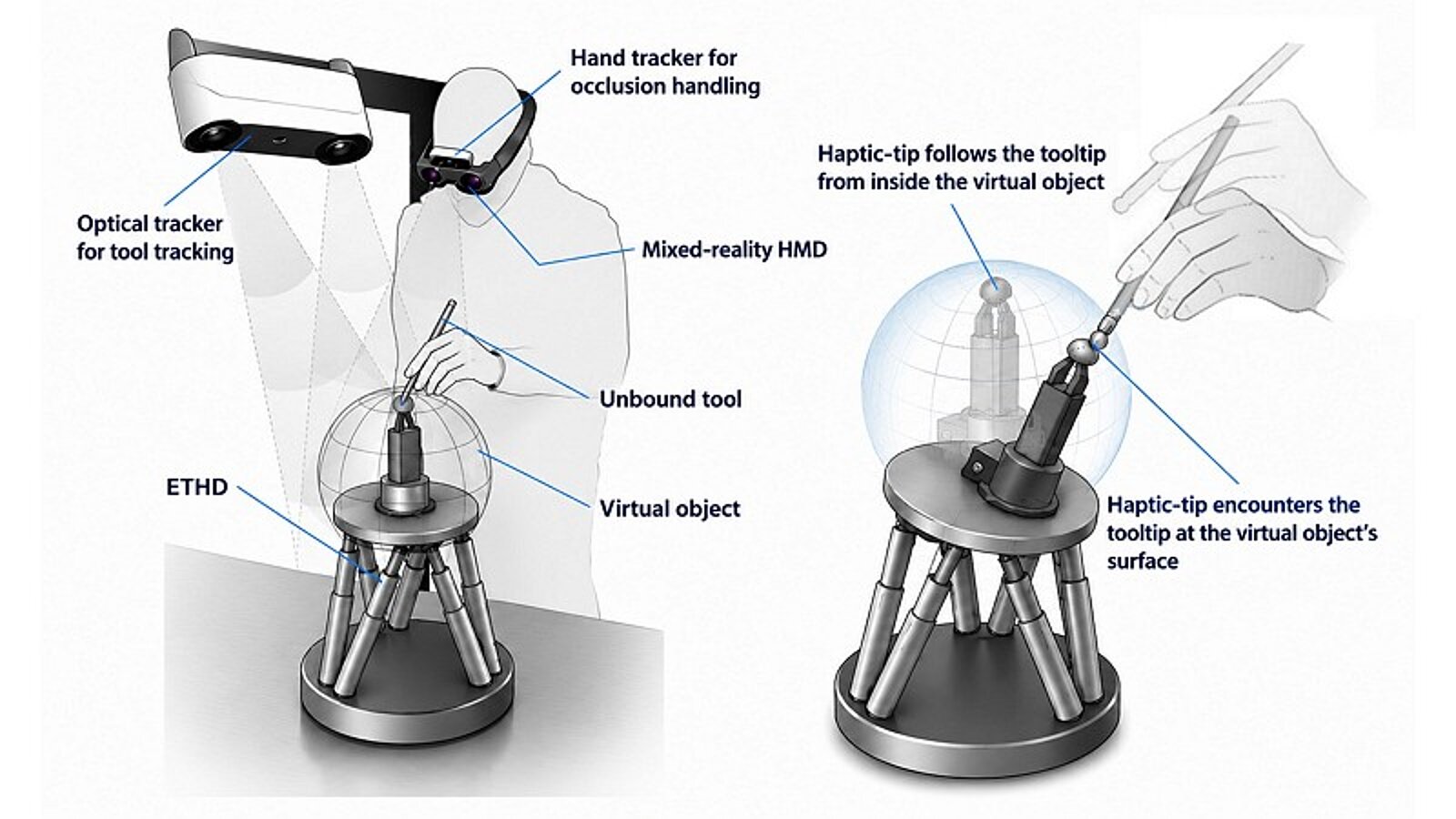
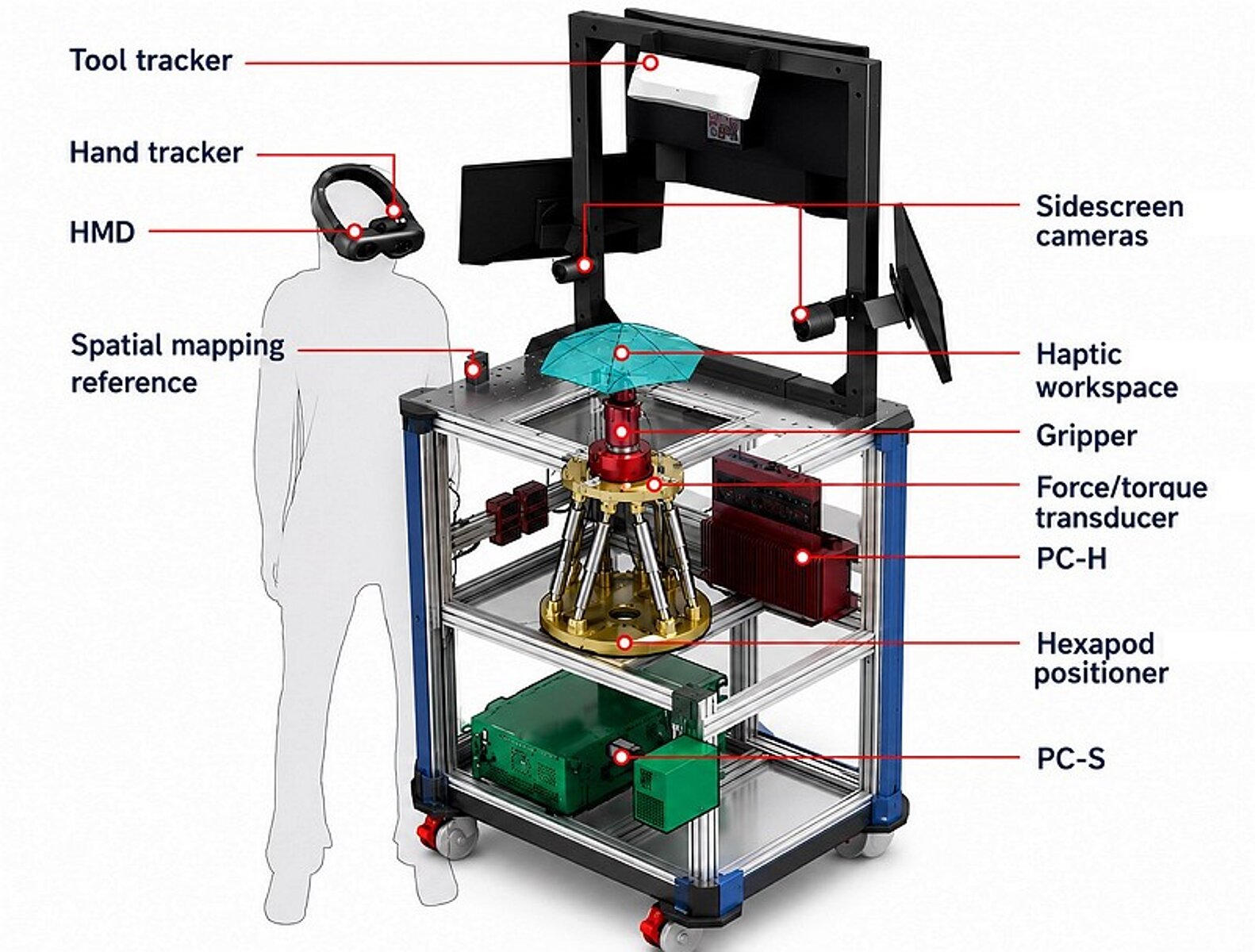
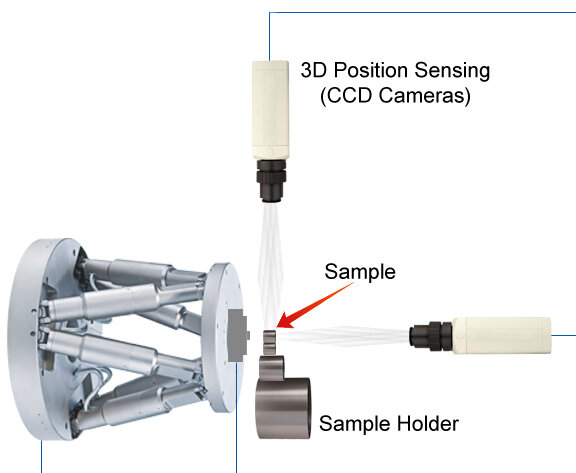
At the heart of the system is a precision PI H-840.D2 six-degree-of-freedom hexapod motion platform. The hexapod forms part of an Encountered-Type Haptic Display (ETHD), which also includes a force/torque sensor and a gripper-mounted haptic tip.
Unlike conventional haptic devices that continuously constrain the user, the hexapod remains hidden beneath the virtual object. Optical tracking continuously measures the position and orientation of the handheld tool.
The hexapod's job is to position its haptic tip directly underneath the virtual surface and follow the user's tool in real time. As long as the tool is outside the virtual object, the hexapod simply tracks the motion. When the user "touches" the virtual object, the haptic tip encounters the tool and generates the appropriate force response.
Why a Hexapod Is Ideal for This Application
A hexapod is uniquely suited for this task because it can simultaneously move in six degrees of freedom:
- X, Y, Z translation and Pitch, Roll, Yaw rotation
This allows the haptic tip to align itself with virtually any tool orientation while maintaining precise contact geometry. Unlike stacked serial stages, the parallel-kinematic architecture provides high stiffness, excellent repeatability, and compact dimensions.

The PI H-840 hexapod positioning system used in the project offers:
- 10 kg payload capacity
- 50 mm/s maximum velocity
- 0.5 µm repeatability
- Real-time EtherCAT control
- Six-axis positioning capability
These characteristics make it possible to create convincing physical interactions with virtual objects.
Rendering Virtual Stiffness
The hexapod does more than simply follow the tool. Once contact occurs, it actively generates force feedback based on the properties of the virtual object.
In the demonstration system, researchers created a virtual tennis ball. The force required to deform a real tennis ball was first measured experimentally. This data was then used to create a haptic model. When a user pressed on the virtual ball with a handheld tool, the hexapod reproduced the same force-deflection behavior that would be experienced with a real object.
The result was a highly synchronized visual and tactile experience where users could both see and feel the virtual object deform.
Future Applications
The authors identify several applications where this approach could provide significant benefits:
- Dental training simulators
- Oral and maxillofacial surgery training
- Orthopedic and pedicle screw placement training
- Maintenance and repair simulations
- Industrial assembly training
- Product design and evaluation systems
Because users can work with realistic handheld tools rather than tethered styluses, the training experience more closely resembles real-world operation.
Conclusion
This mixed-reality research demonstrates an innovative application of hexapod technology beyond traditional positioning and alignment tasks. Acting as an intelligent six-axis haptic interface, the hexapod continuously tracks the user's tool, positions itself beneath the virtual object, and generates realistic force feedback only when contact occurs.
The result is a highly immersive system that combines the flexibility of mixed reality with the physical sensation of touching and manipulating virtual objects. As training simulators continue to evolve, precision hexapods are likely to play an increasingly important role in creating realistic human-machine interaction environments.
For more information read the paper “Visuo-Haptic Mixed Reality Simulation Using Unbound Handheld Tools”







Blog Categories
- Aero-Space
- Air Bearing Stages, Components, Systems
- Astronomy
- Automation, Nano-Automation
- Beamline Instrumentation
- Bio-Medical
- Hexapods
- Imaging & Microscopy
- Laser Machining, Processing
- Linear Actuators
- Linear Motor, Positioning System
- Metrology
- Microscopy
- Motorized Precision Positioners
- Multi-Axis Motion
- Nanopositioning
- Photonics
- Piezo Actuators, Motors
- Piezo Mechanics
- Piezo Transducers / Sensors
- Precision Machining
- Semicon
- Software Tools
- UHV Positioning Stage
- Voice Coil Linear Actuator
- X-Ray Spectroscopy